PDF version (NAG web site
, 64-bit version, 64-bit version)
NAG Toolbox: nag_tsa_cp_binary (g13nd)
Purpose
nag_tsa_cp_binary (g13nd) detects change points in a univariate time series, that is, the time points at which some feature of the data, for example the mean, changes. Change points are detected using binary segmentation using one of a provided set of cost functions.
Syntax
[
tau,
sparam,
ifail] = g13nd(
ctype,
y, 'n',
n, 'beta',
beta, 'minss',
minss, 'param',
param, 'mdepth',
mdepth)
[
tau,
sparam,
ifail] = nag_tsa_cp_binary(
ctype,
y, 'n',
n, 'beta',
beta, 'minss',
minss, 'param',
param, 'mdepth',
mdepth)
Description
Let denote a series of data and denote a set of ordered (strictly monotonic increasing) indices known as change points, with and . For ease of notation we also define . The change points, , split the data into segments, with the th segment being of length and containing .
Given a cost function,
,
nag_tsa_cp_binary (g13nd) gives an approximate solution to
where
is a penalty term used to control the number of change points. The solution is obtained in an iterative manner as follows:
| 1. |
Set , and |
| 2. |
Set . If , where is a user-supplied control parameter, then terminate the process for this segment. |
| 3. |
Find that minimizes
|
| 4. |
Test
|
| 5. |
If inequality (1) is false then the process is terminated for this segment. |
| 6. |
If inequality (1) is true, then is added to the set of change points, and the segment is split into two subsegments, and . The whole process is repeated from step 2 independently on each subsegment, with the relevant changes to the definition of and (i.e., is set to when processing the left hand subsegment and is set to when processing the right hand subsegment.
|
The change points are ordered to give
.
nag_tsa_cp_binary (g13nd) supplies four families of cost function. Each cost function assumes that the series,
, comes from some distribution,
. The parameter space,
is subdivided into
containing those parameters allowed to differ in each segment and
those parameters treated as constant across all segments. All four cost functions can then be described in terms of the likelihood function,
and are given by:
where the
is the maximum likelihood estimate of
within the
th segment. Four distributions are available; Normal, Gamma, Exponential and Poisson distributions. Letting
the log-likelihoods and cost functions for the four distributions, and the available subdivisions of the parameter space are:
- Normal distribution:
- Mean changes:
- Variance changes:
- Both mean and variance change:
- Gamma distribution:
- Exponential Distribution:
- Poisson distribution:
- Mean changes:
when calculating for the Poisson distribution, the sum is calculated for rather than .
References
Chen J and Gupta A K (2010) Parametric Statistical Change Point Analysis With Applications to Genetics Medicine and Finance Second Edition Birkhäuser
West D H D (1979) Updating mean and variance estimates: An improved method Comm. ACM 22 532–555
Parameters
Compulsory Input Parameters
- 1:
– int64int32nag_int scalar
-
A flag indicating the assumed distribution of the data and the type of change point being looked for.
- Data from a Normal distribution, looking for changes in the mean, .
- Data from a Normal distribution, looking for changes in the standard deviation .
- Data from a Normal distribution, looking for changes in the mean, and standard deviation .
- Data from a Gamma distribution, looking for changes in the scale parameter .
- Data from an exponential distribution, looking for changes in .
- Data from a Poisson distribution, looking for changes in .
Constraint:
, , , , or .
- 2:
– double array
-
, the time series.
if , that is the data is assumed to come from a Poisson distribution, is used in all calculations.
Constraints:
- if , or , , for ;
- if , each value of y must be representable as an integer;
- if , each value of y must be small enough such that , for , can be calculated without incurring overflow.
Optional Input Parameters
- 1:
– int64int32nag_int scalar
-
Default:
the dimension of the array
y.
, the length of the time series.
Constraint:
.
- 2:
– double scalar
Default:
- if , ;
- otherwise .
, the penalty term.
There are a number of standard ways of setting
, including:
- SIC or BIC
-
- AIC
-
- Hannan-Quinn
-
where
is the number of parameters being treated as estimated in each segment. This is usually set to
when
and
otherwise.
If no penalty is required then set . Generally, the smaller the value of the larger the number of suggested change points.
- 3:
– int64int32nag_int scalar
Default:
The minimum distance between two change points, that is .
Constraint:
.
- 4:
– double array
-
, values for the parameters that will be treated as fixed. If
then
param must be supplied.
- , the standard deviation of the normal distribution. If not supplied then is estimated from the full input data,
- , the mean of the normal distribution. If not supplied then is estimated from the full input data,
- must hold the shape, , for the gamma distribution,
- otherwise
- param is not referenced.
Constraint:
if or , .
- 5:
– int64int32nag_int scalar
Default:
, the maximum depth for the iterative process, which in turn puts an upper limit on the number of change points with
.
If then no limit is put on the depth of the iterative process and no upper limit is put on the number of change points.
Output Parameters
- 1:
– int64int32nag_int array
-
The dimension of the array
tau will be
The location of the change points. The th segment is defined by to , where and .
- 2:
– double array
-
Note: sparam will be an array of size
If , and of size
otherwise.
The estimated values of the distribution parameters in each segment
- , or
-
and
for , where and is the mean and standard deviation, respectively, of the values of in the th segment.
It should be noted that when and when , for all and .
-
and
for , where and are the shape and scale parameters, respectively, for the values of in the th segment. It should be noted that for all .
- or
- for , where is the mean of the values of in the th segment.
- 3:
– int64int32nag_int scalar
unless the function detects an error (see
Error Indicators and Warnings).
Error Indicators and Warnings
Errors or warnings detected by the function:
Cases prefixed with W are classified as warnings and
do not generate an error of type NAG:error_n. See nag_issue_warnings.
-
-
Constraint: , , , , or .
-
-
Constraint: .
-
-
Constraint: if , or then , for .
-
-
On entry, , is too large.
-
-
Constraint: .
-
-
Constraint: if
or
and
param has been supplied, then
.
- W
-
To avoid overflow some truncation occurred when calculating the cost function, . All output is returned as normal.
- W
-
To avoid overflow some truncation occurred when calculating the parameter estimates returned in
sparam. All output is returned as normal.
-
An unexpected error has been triggered by this routine. Please
contact
NAG.
-
Your licence key may have expired or may not have been installed correctly.
-
Dynamic memory allocation failed.
Accuracy
The calculation of means and sums of squares about the mean during the evaluation of the cost functions are based on the one pass algorithm of
West (1979) and are believed to be stable.
Further Comments
None.
Example
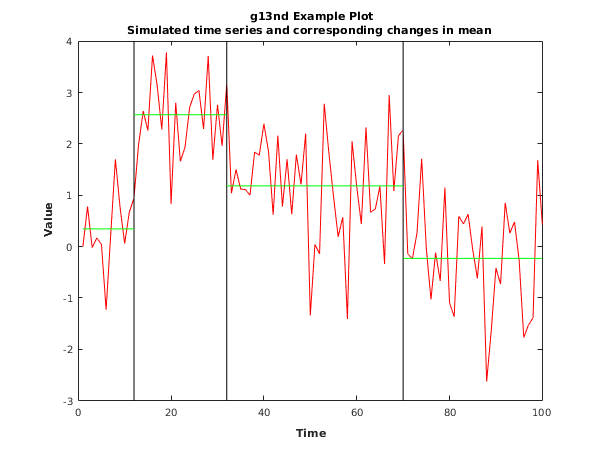
This example identifies changes in the mean, under the assumption that the data is normally distributed, for a simulated dataset with observations. A BIC penalty is used, that is , the minimum segment size is set to and the variance is fixed at across the whole input series.
Open in the MATLAB editor:
g13nd_example
function g13nd_example
fprintf('g13nd example results\n\n');
y = [ 0.00; 0.78;-0.02; 0.17; 0.04;-1.23; 0.24; 1.70; 0.77; 0.06;
0.67; 0.94; 1.99; 2.64; 2.26; 3.72; 3.14; 2.28; 3.78; 0.83;
2.80; 1.66; 1.93; 2.71; 2.97; 3.04; 2.29; 3.71; 1.69; 2.76;
1.96; 3.17; 1.04; 1.50; 1.12; 1.11; 1.00; 1.84; 1.78; 2.39;
1.85; 0.62; 2.16; 0.78; 1.70; 0.63; 1.79; 1.21; 2.20;-1.34;
0.04;-0.14; 2.78; 1.83; 0.98; 0.19; 0.57;-1.41; 2.05; 1.17;
0.44; 2.32; 0.67; 0.73; 1.17;-0.34; 2.95; 1.08; 2.16; 2.27;
-0.14;-0.24; 0.27; 1.71;-0.04;-1.03;-0.12;-0.67; 1.15;-1.10;
-1.37; 0.59; 0.44; 0.63;-0.06;-0.62; 0.39;-2.63;-1.63;-0.42;
-0.73; 0.85; 0.26; 0.48;-0.26;-1.77;-1.53;-1.39; 1.68; 0.43];
ctype = int64(1);
param = 1;
warn_state = nag_issue_warnings();
nag_issue_warnings(true);
[tau,sparam,ifail] = g13nd( ...
ctype, y, 'param', param);
nag_issue_warnings(warn_state);
fprintf(' -- Change Points -- --- Distribution ---\n');
fprintf(' Number Position Parameters\n');
fprintf(' ==================================================\n');
for i = 1:numel(tau)
fprintf('%5d%13d%16.2f%16.2f\n', i, tau(i), sparam(1:2,i));
end
fig1 = figure;
plot(y,'Color','red');
xpos = transpose(double(tau(1:end-1))*ones(1,2));
ypos = diag(ylim)*ones(2,numel(tau)-1);
line(xpos,ypos,'Color','black');
xpos = transpose(cat(2,cat(1,1,tau(1:end-1)),tau));
ypos = ones(2,1)*sparam(1,:);
line(xpos,ypos,'Color','green');
title({'{\bf g13nd Example Plot}',
'Simulated time series and corresponding changes in mean'});
xlabel('{\bf Time}');
ylabel('{\bf Value}');
g13nd example results
-- Change Points -- --- Distribution ---
Number Position Parameters
==================================================
1 12 0.34 1.00
2 32 2.57 1.00
3 70 1.18 1.00
4 100 -0.23 1.00
This example plot shows the original data series, the estimated change points and the estimated mean in each of the identified segments.
PDF version (NAG web site
, 64-bit version, 64-bit version)
© The Numerical Algorithms Group Ltd, Oxford, UK. 2009–2015